

Capteur de Volée Arc
Consignes
Le tir à l’arc est une pratique sportive qui demande de la régularité, tant sur le plan du geste que sur le rythme de la volée. Répéter le mouvement permet ainsi de répéter la performance et les résultats.
L’archer met ainsi toutes ses chances de son côté pour réussir lors des compétitions malgré le stress.
Les discussions avec les pratiquants ont mis en évidence le besoin de décocher sa volée (généralement 5 flèches) avec constance. Il importe donc à l’archer de connaître le temps séparant chaque départ de flèches.
Un prototype a montré l’intérêt du produit. Le démonstrateur est un système simple avec afficheur, fixé sur la poignée, qui indique le temps en seconde séparant le temps entre chaque décochage.
Il s’agit maintenant de produire un nouveau prototype, plus petit, consommant moins, et en liaison avec une application sur un smartphone qui doit assurer l’affichage de l’information
• détection automatique du départ de la flèche
• Mesure du temps entre chaque flèche
• Détection du début et fin de la volée
• enregistrement et affichage du rythme sur une application Android


Analyse fonctionnelle
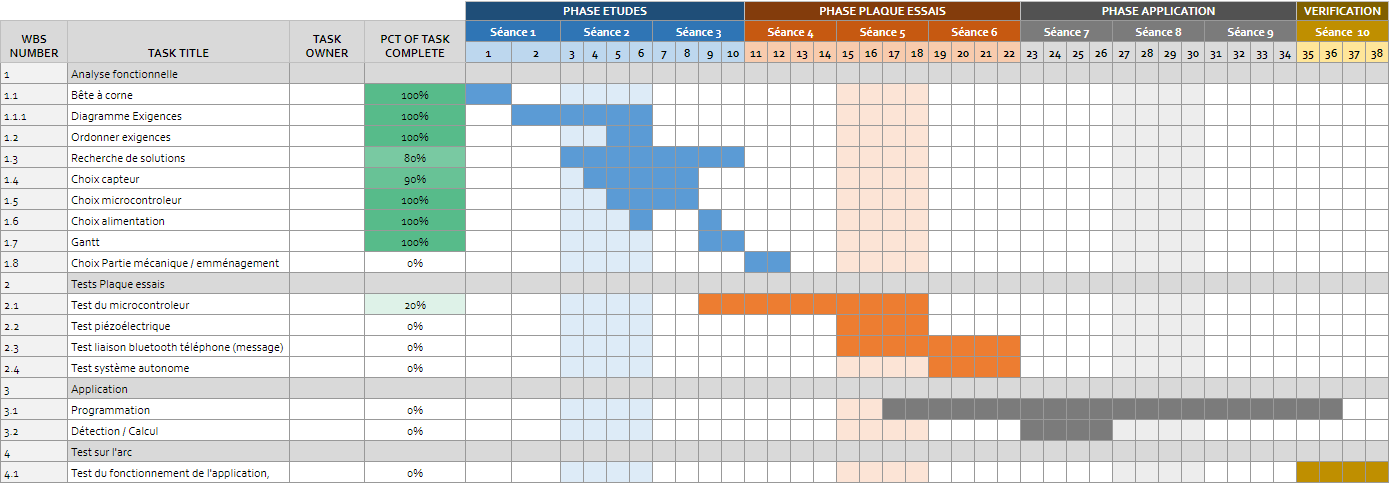
Gantt
Puis nous avons produit un diagramme de GANTT, pour cela nous avons listé les différentes grandes étapes de la conception et de la production du projet :
- Analyse des besoins et spécifications
- Conception du prototype
- Développement de l'application mobile
- Intégration et tests
- Améliorations et ajustements
- Présentation du projet
Cahier des charges
I. Objectifs
Le but de ce projet est de développer un prototype de dispositif permettant de mesurer avec précision le temps entre les flèches décochées par un archer, ainsi qu'une application mobile pour afficher et enregistrer ces informations. Le prototype doit être léger, compact, facile à utiliser et consommer peu d'énergie.
II. Fonctionnalités attendues du prototype
Détection automatique du départ de la flèche.
Mesure du temps entre chaque flèche décochée.
Détection du début et de la fin de la volée (généralement 5 flèches).
Communication sans fil avec une application mobile pour transmettre les données mesurées.
Fonctionnement sur batterie avec une consommation d'énergie réduite.
Design ergonomique et facile à fixer sur la poignée de l'arc sans gêner l'utilisateur.
III. Fonctionnalités attendues de l'application mobile
Affichage en temps réel du temps entre les flèches décochées.
Enregistrement et affichage du début et de la fin de la volée.
Historique des performances de l'utilisateur avec la possibilité de consulter et d'analyser les données antérieures.
Interface utilisateur intuitive et facile à utiliser.
Compatibilité avec les smartphones Android.
IV. Contraintes techniques
Le prototype doit être compatible avec différents types d'arcs.
Le prototype doit fonctionner correctement même en présence de vibrations ou de mouvements de l'arc.
Le dispositif doit être facile à installer et à retirer de l'arc.
V. Livrables attendus
Un prototype fonctionnel du dispositif de mesure du temps entre les flèches.
Une application mobile Android développée pour afficher et enregistrer les données du prototype.
Un rapport technique détaillé décrivant la conception, le développement et les tests du prototype et de l'application mobile.
Une présentation du projet, incluant les objectifs, les fonctionnalités, les contraintes techniques et les résultats obtenus.
En respectant ces exigences et contraintes, le prototype et l'application mobile devraient permettre aux archers de mieux comprendre et améliorer leur régularité et leurs performances lors des compétitions.










Choix des composants
Microcontrôleur :
Pour le cœur du prototype, un microcontrôleur à faible consommation d'énergie et suffisamment de puissance de calcul est nécessaire. Un exemple de microcontrôleur approprié est l'ESP 32, qui offre des fonctionnalités Bluetooth intégrées et une faible consommation d'énergie.
Logiciel embarqué :
Le microcontrôleur doit être programmé pour traiter les données des capteurs, détecter le départ de la flèche, et communiquer avec l'application mobile via Bluetooth. Le calcul de temps entre 2 flèches sera effectué via l’application.
Alimentation électrique :
Pour alimenter le prototype, nous avons 2 solutions, une batterie LiPo ou bien une pile plate.
Communication sans fil :
Pour la communication entre le prototype et l'application mobile, une connexion Bluetooth à faible consommation d'énergie (BLE) est recommandée. L'ESP32 mentionné précédemment possède déjà une fonctionnalité Bluetooth intégrée.








Capteurs :
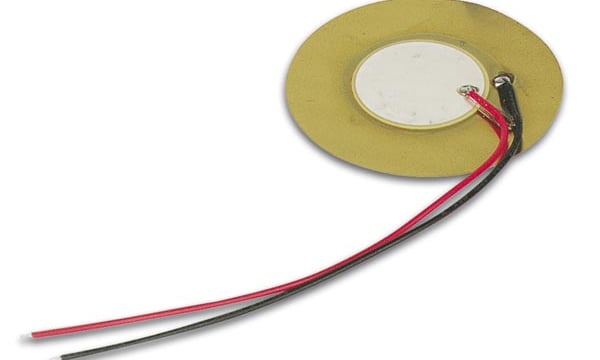
Capteur piézoélectrique sur l'arc : ce capteur peut être placé sur la poignée ou la corde de l'arc pour détecter la vibration produite lors du tir de la flèche.
Capteur piézoélectrique sur la cible : ce capteur peut être placé sur la cible pour détecter la vibration produite lorsque la flèche atteint la cible.
Capteur inductif : ce capteur peut détecter la présence d'objets conducteurs en mesurant les changements de champ magnétique générés par ces objets
Capteur optique : ce capteur peut être utilisé pour détecter le départ de la flèche en mesurant la différence de lumière lorsqu'elle est décochée.
Capteur capacitif : ce capteur peut être utilisé pour mesurer le temps entre chaque décochage en détectant un changement de capacité.
Capteur à ultrasons : ce capteur peut être utilisé pour détecter le départ de la flèche.
Capteur infrarouge : ce capteur peut être utilisé pour détecter le départ de la flèche en mesurant la différence de chaleur produite lorsqu'elle est tirée.
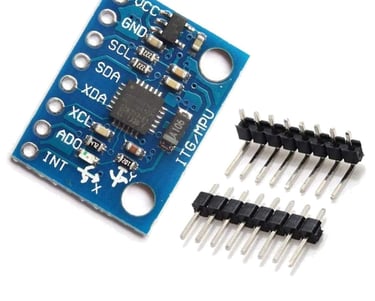
Capteur gyroscope + accéléromètre : ce capteur peut être utilisé pour mesurer le temps entre chaque décochage en détectant le mouvement de l'arc et la position de la flèche.

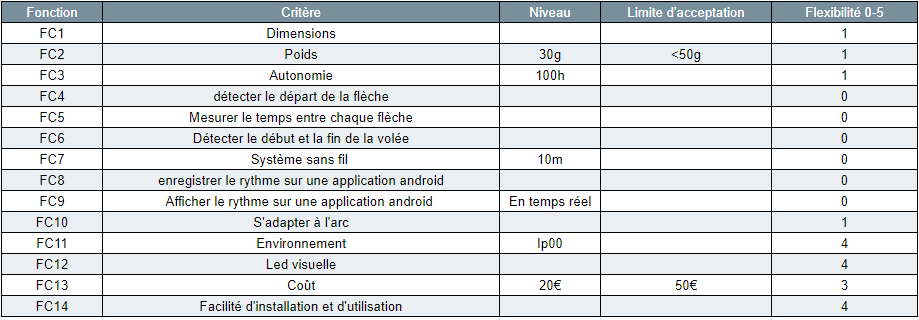
Choix du capteur
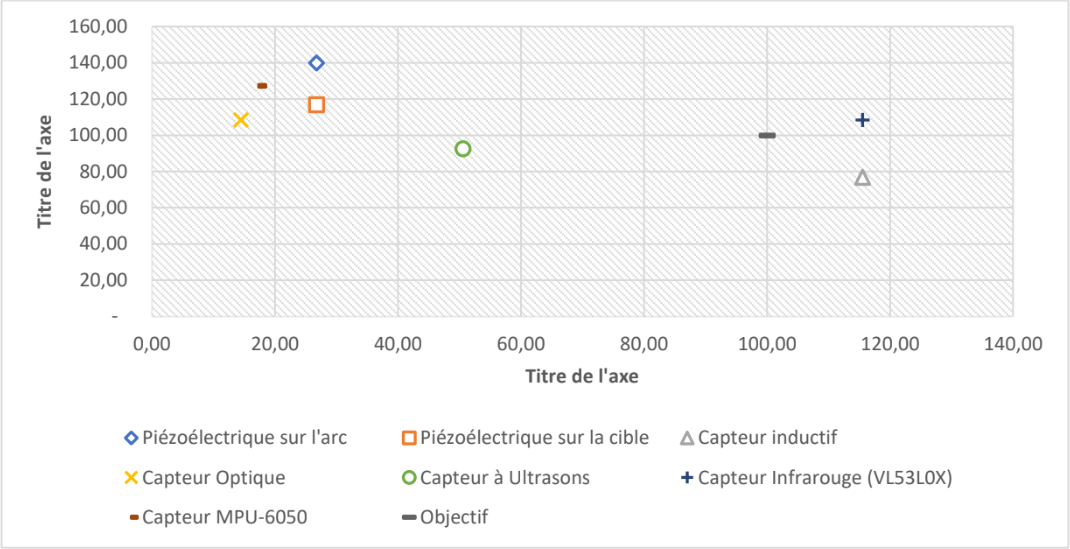

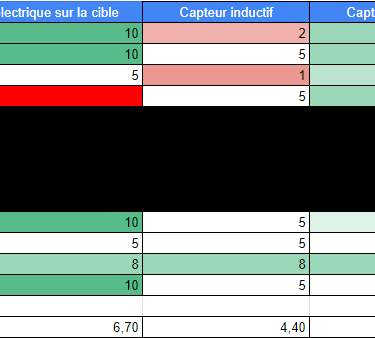
Afin de comparer efficacement les différentes solutions, nous utiliserons une matrice décisionnelle.
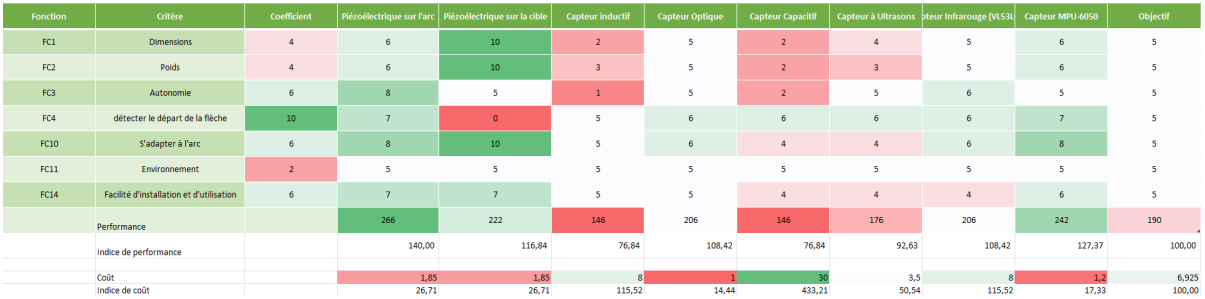
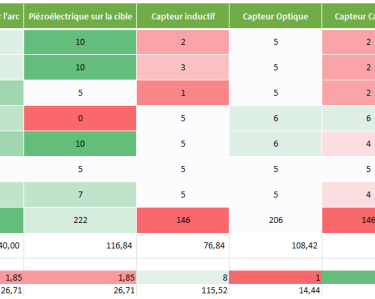
Ainsi on obtient 3 capteurs qui correspondent à notre solution.
- Capteur piézoélectrique
- Capteur MPU-6050 qui est un accéléromètre.
- Capteur Optique
Les autres capteurs sont soit trop coûteux, soit ne permettent pas de détecter la flèche, soit était trop compliqué à installer pour l’utilisateur. La détection des vibrations de l’arc lors d’un tir de flèche parait être la solution optimale.
Parmi les 3 solutions restante nous avons fait le choix de prendre un capteur piézoélectrique, car il est peu cher et sera plus facile à implanter que l’accéléromètre, il sera toutefois moins précis mais pour notre application la précision n’est pas primordiale


Consommation du système :
Il faut vérifier que le système ne consomme pas excessivement afin de respecter l’exigence de temps de fonctionnement.
L’ESP32 consomme 239mA lors de la télécommunication Bluetooth (pendant 50ms) et consomme 50nA en fonctionnement nominal.
On fait l’hypothèse de 1 tir toutes les 30 secondes.
Sur une heure on tir 120 flèches, il faut donc faire 120 télécommunications de 50ms.
Soit 6000ms de télécommunication sur une heure.
Le système consomme 0.4mAh.
Sachant que nous avons choisi une pile plate de 250mA
➔ 250/0.4 = 625h
Le système peut fonctionner pendant 625heures.
Donc l’exigence d’autonomie est respectée.


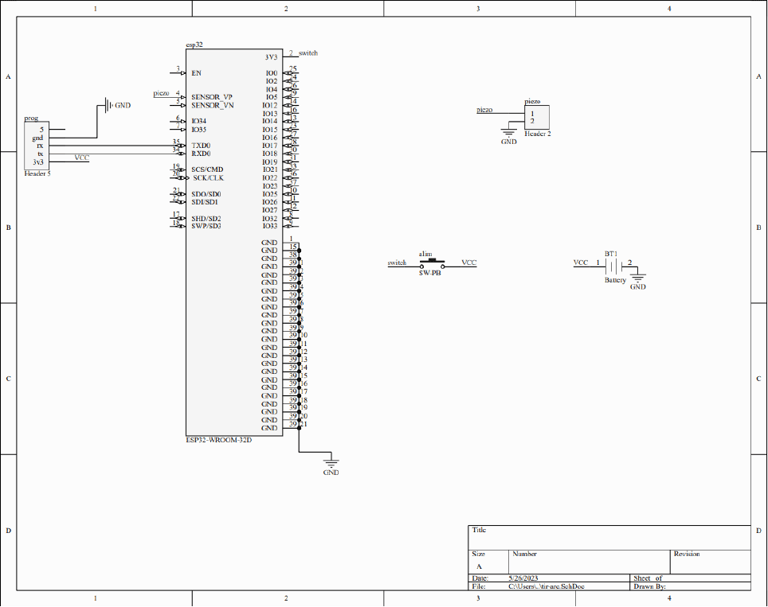
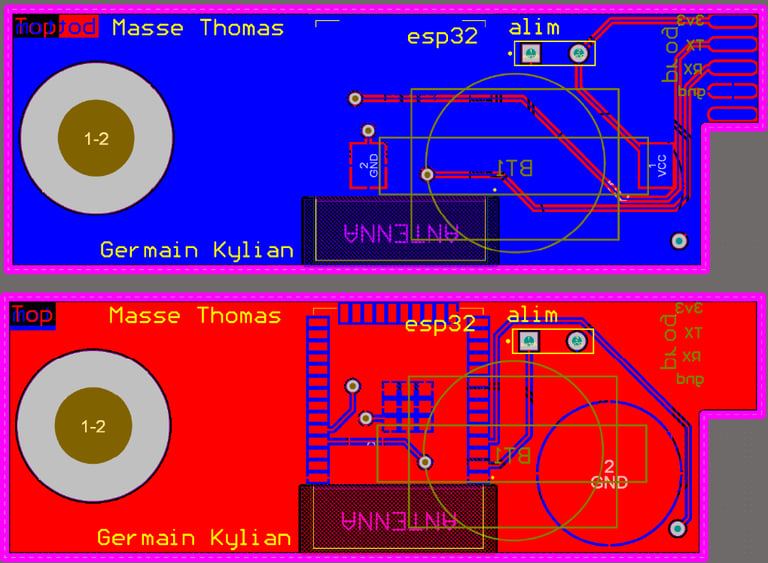
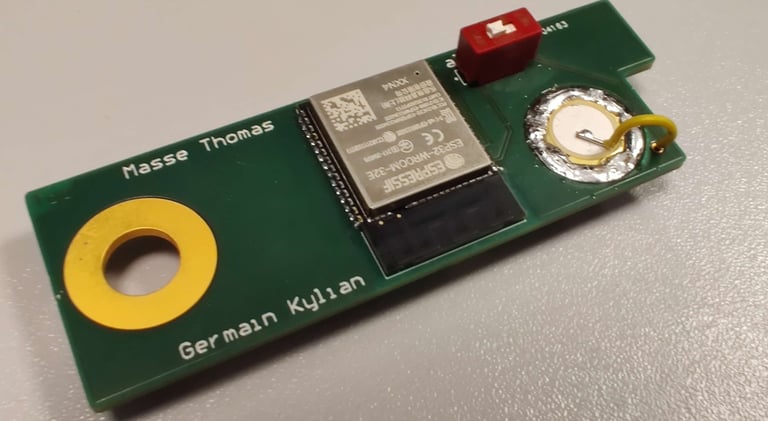
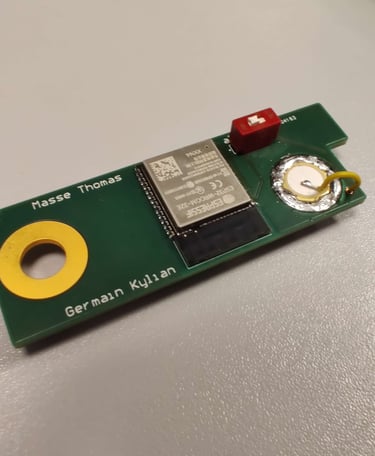
Conception du PCB et routage sur Altium
On réalise ensuite l'emménagement des composants sur la carte
On va dans un premier temps réalise le PCB avec le logiciel Altium.
Pour la partie fonctionnelle il n’y pas beaucoup d’éléments, un microcontrôleur, un bouton, une pile plate, un capteur piézoélectrique.
Montage et soudage des composants :
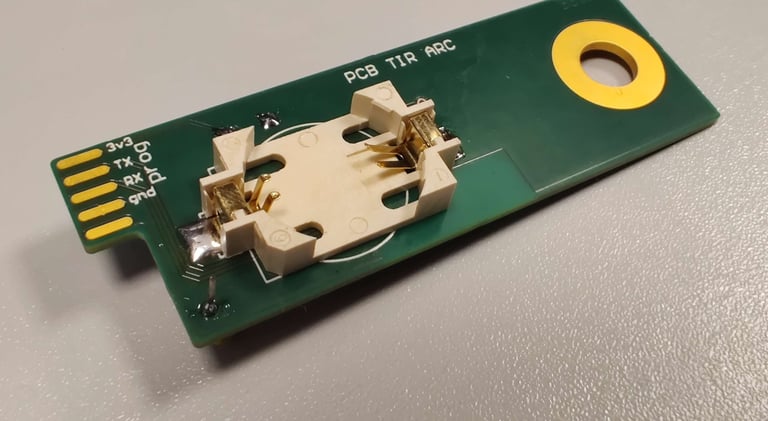


Le système s'adapte correctement à l'arc et est facile à installer :


Le système ne trouble pas l’utilisation de l’arc.
Conception du programme
Dans un premier temps il faut produire une nouvelle analyse fonctionnelle pour le cahier des charges :
Exigences fonctionnelles
Détecter automatiquement le départ de la flèche à l'aide d'un capteur piézoélectrique.
Mesurer le temps entre chaque flèche tirée.
Détecter le début et la fin d'une volée.
Afficher des informations sur les flèches et les volées.
Enregistrer et afficher le rythme de tir sur l'application Android.
Synchroniser les données de l'application avec le capteur piézoélectrique et le dispositif de l'archer.
Exigences non fonctionnelles
Performance : L'application doit répondre rapidement aux interactions de l'utilisateur et aux événements du capteur piézoélectrique. Les temps de latence doivent être minimisés pour garantir une expérience utilisateur fluide.
Compatibilité : L'application doit être compatible avec une large gamme de smartphones Android et de versions du système d'exploitation Android.
Ergonomie : L'interface utilisateur doit être simple, intuitive et facile à utiliser pour les archers de tous niveaux et de toutes compétences techniques.
Fiabilité : L'application doit fonctionner de manière fiable et sans erreur, même dans des conditions de fonctionnement difficiles, comme des conditions météorologiques extrêmes ou des interférences électromagnétiques.
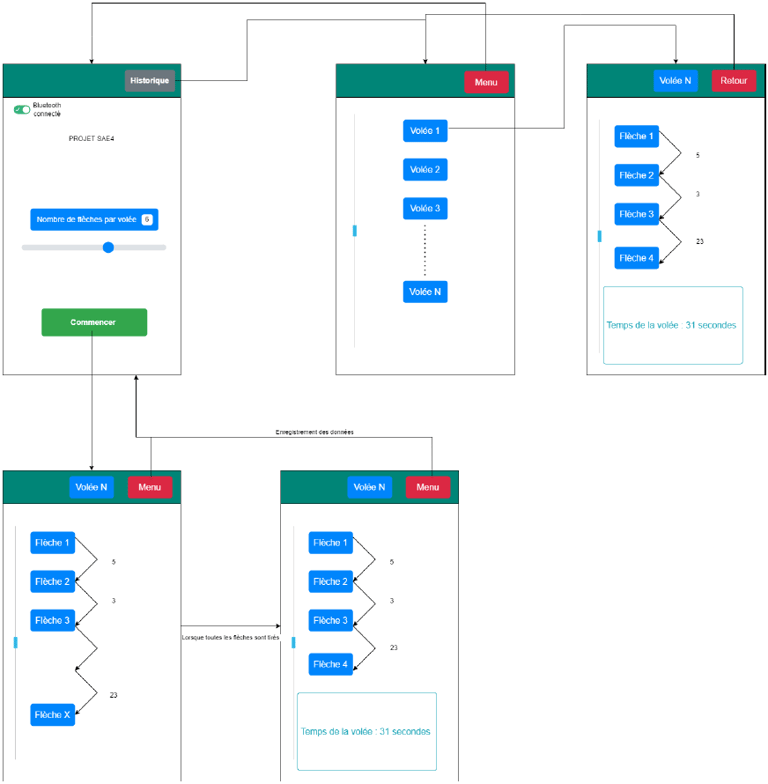
Fonctionnement :
L’application doit dans un premier temps se connecter via Bluetooth sur le microcontrôleur ESP-32.
L’utilisateur doit entrer dans l’application le nombre de flèche de la volée suivante.
Ensuite l’utilisateur tir ces différentes flèches
En temps réel le temps entre chaque flèche est affiché dès que l’on a l’information.
L’utilisateur peut stopper sa volée à tout moment
Maquette de l'application :
Diagramme d’interaction
On produit ensuite un diagramme interaction :
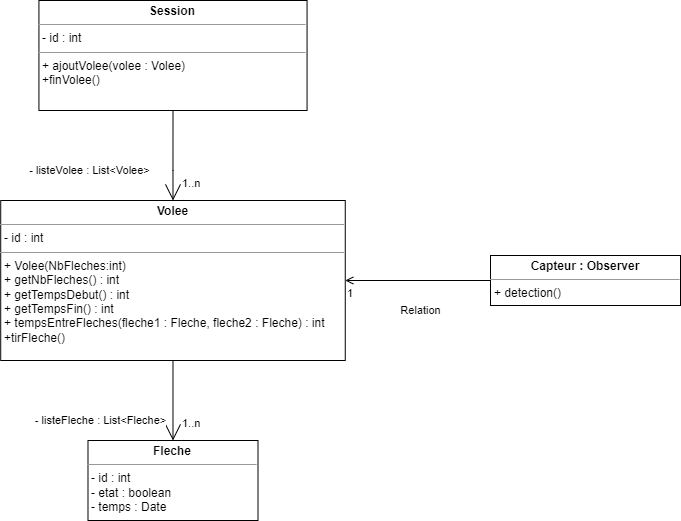
Programmation des classes :
Nous avons commencé la programmation des différentes classes. Voici un lien GitHub du projet :
Par manque de temps nous n'avions pas fini l'application et le programme
REX :
- Led visuelle pour tester la carte
Nous aurions dû inclure une LED visuelle dans la conception pour pouvoir vérifier le bon fonctionnement du microcontrôleur. Initialement, nous avions spécifié l’exigence d’une « LED visuelle », mais ultérieurement, nous avons décidé de ne pas l’intégrer sur la carte, pensant qu’elle ne serait pas nécessaire.
- Faire des points de tests
- Carte avec programmateur intégré
Nous avons rencontré de nombreux problèmes liés à la programmation du microcontrôleur. Pour du prototypage et si l’emménagement le permet, le choix d’un microcontrôleur avec programmateur intégré sera moins source de problème.
- Dérisquer les capteurs
Lors de la lecture du capteur piézoélectrique sur le PCB, le pin du capteur nous renvoyait des valeurs étranges, le problème est soit lié au câblage, soit à l’intégration
REX et Conclusion
Conclusion :
Le projet n'est finalement pas fonctionnel, le capteur piézoélectrique ne fonctionne pas et nous avons perdu beaucoup trop de temps sur la mise en fonctionnement de l'ESP-32.