
Drone sous-marin
Le projet :
Vers la fin de 2023, j'ai fait la découverte de CPSdrone, une chaîne YouTube crée par Filip et Piotr. Avec leur équipe, ils se sont fixé pour mission de concevoir un drone entièrement fabriqué par impression 3D.
J'ai trouvé la démarche vraiment intéressante et je me suis décidé moi aussi à construire un drone sous-marin.
Ce projet à été entièrement financé par moi-même.
Comme c'est un objet plutôt complexe, j'ai décidé de suivre leur cours en ligne et d'ajouter moi-même quelques modifications. Le drone que je vais essayer de construire sera le CPS 5 (Custom Printed Submarine). Afin de simplifier les explication et de différentier leur version de la mienne, on appellera à partir de maintenant ma version le CPS T (Pour Custom Printed Submarine Thomas.
Début 2024, je me décide à commander le matériel en vue d'un début de construction en mars 2024.


Fonctionnement du drone :
Le drone est équipé de 75 composants différents.
Voici la liste et le fonctionnement des composants les plus importants du drone :
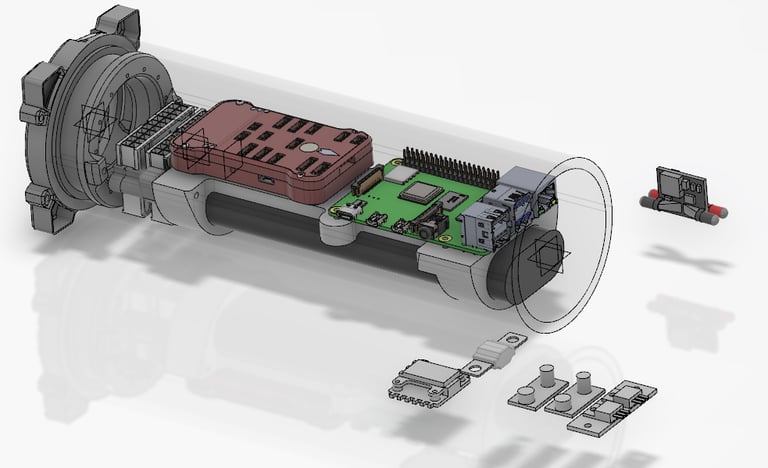
Tube acrylique principal
Le tube contient tout l'électronique de contrôle commande, ce tube est remplit d'air, il ne dois en aucun cas y avoir de l'eau à l'intérieur.
Embouts Tube principal
Les embouts du tube principal servent à ce que l'eau ne puissent pas rentrer dans le tube principal. Chaque embout est différents, 1 doit juste empêcher l'eau d'entrer et l'autre doit permettre de faire passer les câbles de commandes sans pour autant faire rentrer l'eau. Il s'agit d'une des parties les plus critiques.
Superstructures
Les superstructures sont imprimées en 3D, elles permettent de rendre le drone hydrodynamique et de faire tenir les différentes parties du drone entre elles.
Caméra
Le drone est équipé d'une caméra à l'avant, cette caméra est elle dans un tube en acrylique transparent.
3x A2212 motor + 2x Sunnysky motor
Il s'agit des moteurs du drone, 2 servent à la propulsion, 3 servent à la direction du drone. Le drone avec ces 5 moteurs à 5 degrés de liberté.
Module Led + lentille + Control Module led
Ces 3 composants permettent de voir dans les fond marins, il s'agit de 2 modules led, de 2 lentilles pour pouvoir concentrer la lumière et 2 modules permettant de contrôler l'état logique des leds.
Câble de communication
Pour de nombreuses raisons que j’expliquerai plus tard, le drone est constamment relié à un câble de communication entre le PC et le drone.
Batteries
Le drone est équipé de batteries disposés en 3s2p 12V.
Connecteur
Le connecteur est un "WEIPU Connector", je relie dessus le câble RJ45 servant à la communication et l'alimentation pour pouvoir recharger la batterie via le connecteur.
ESC
Les ESC servent à piloter les moteurs, J'utilise des ESC 20A.
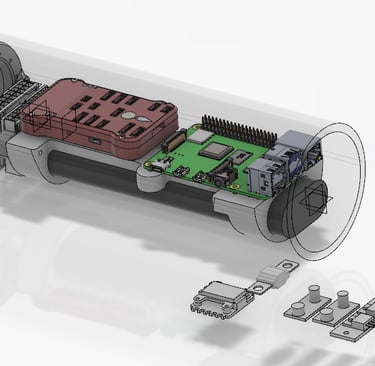
Pixhawk
Il s'agit d'un module de contrôle système de drone, c'est cet objet qui donne l'ordre d'activation des moteurs. ce module est équipé d'un gyroscope et a de nombreux avantages. Grâce à ce module on peut utiliser des logiciels de pilotage de drone déjà existant.
Raspberry pi
Le Raspberry gère le flux vidéo et la transmets les commandes du pc vers la carte Pixhawk.
Afin d'aider à la compréhension du document, je vais expliquer le fonctionnement global du drone, et le fonctionnement des composants les plus importants. Je rentrerait dans les détails par partie plus tard.
Achat des composants
Afin d'être efficace lors des achats je me sert d'un BOM (Bill Of Material).
Je commande la plupart des composants sur Aliexpress, j'ai commandé le Raspberry pi chez Mouser.
Le coût total du drone est de 607,02€
Je devrait recevoir la plupart des composants mi-Août
Impression 3D des superstructures :
La partie la plus compliqué à imprimer est la superstructure extérieur du drone.
Il s'agit des impressions 3D les plus imposantes.
Pour cela j'ai utilisé une imprimante 3D de l'IUT Brest-Morlaix.
L'impression 3D à duré 3 Jours, après discussion avec les techniciens de l'IUT, on a pu imprimer les 3 pièces sur un seul plateau.
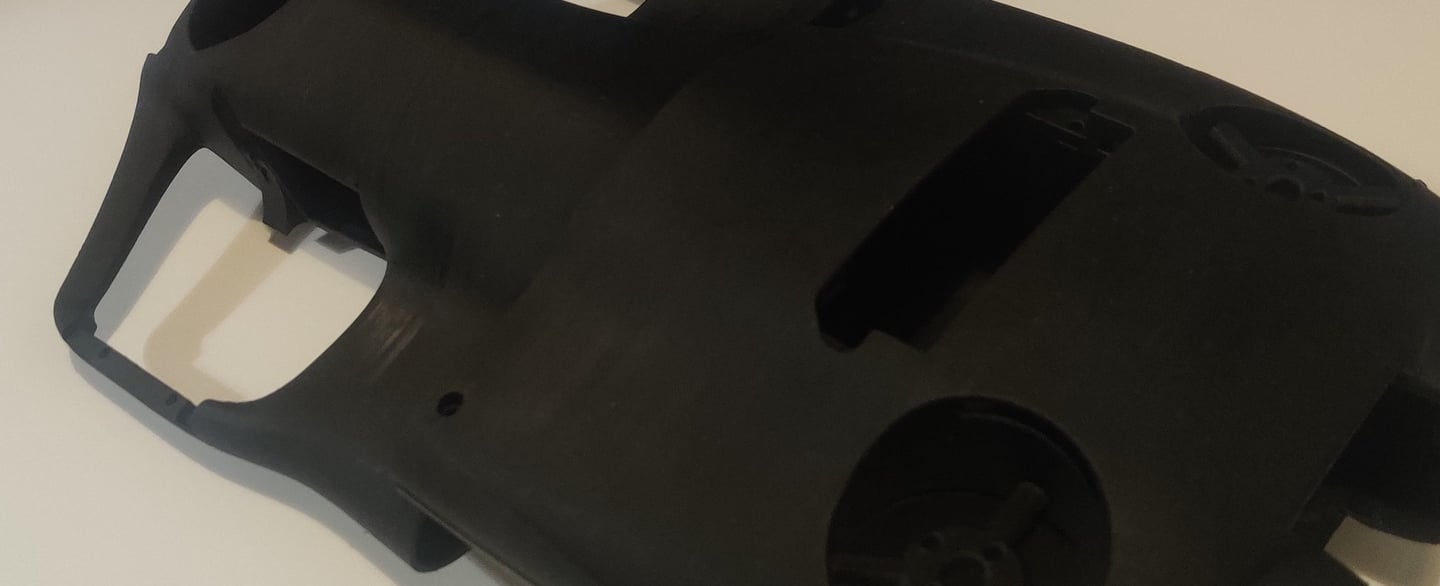
Cependant comme on peut le voir sur la photo, il y a eu un problème avec l'impression d'une pièce, elle à donc du être réimprimé.
Les pièces ont ensuite étés placés dans un bain d'acide afin de détacher les supports de pièce.


Après le traitement des pièces, on obtient le résultat suivant :


Batteries
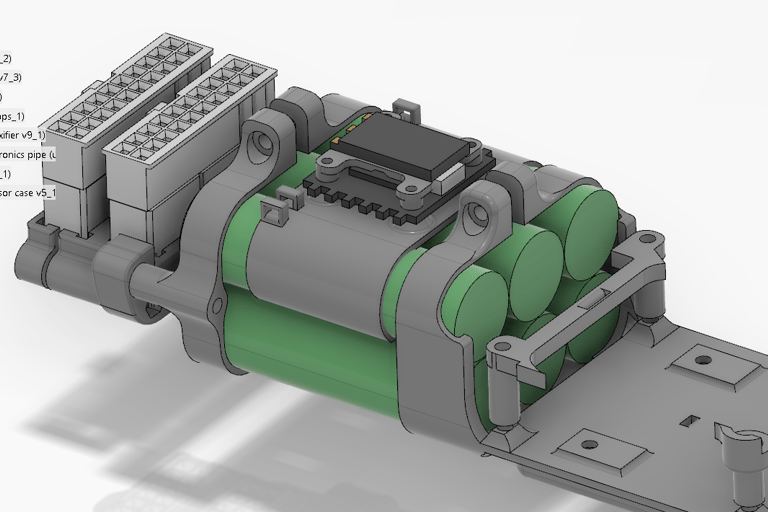
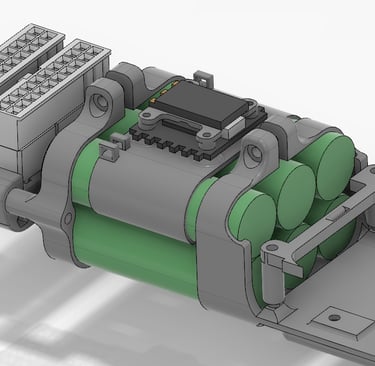
J'ai choisi d'utiliser des batteries différentes. Il s'agit d'anciennes batteries lithium-ion provenant d'un ancien variateur.
Ces batteries ne m’ont rien coûté puisqu’il s'agit de récupération. Par rapport au batteries du CPS 5, ces batteries auront un BMS inclus (Batterie Management System), permettant la charge des batteries sans chargeur particulier (contrairement au choix du CPS 5).
Les batteries sont en 3s2p et sont elles aussi en 12V, cependant elles ont une grande différence par rapport aux batteries du CPS 5, elles ne sont pas disposés de la même façon.
Elles ont cependant le même volume, Il faut donc entièrement revoir l'emménagement du tube. Il faut aussi refaire tous les supports à l'intérieur du tube.
Il faut dans un premier temps placer les gros volumes.
Puis ensuite il faut modéliser les supports de tous les composants afin que tout reste en place lors du déplacement du drone.




Caméra :
Je possède un drone volant de la marque MJX. Ce drone à une caméra, afin de faire des économies je vais essayer de récupérer cette caméra
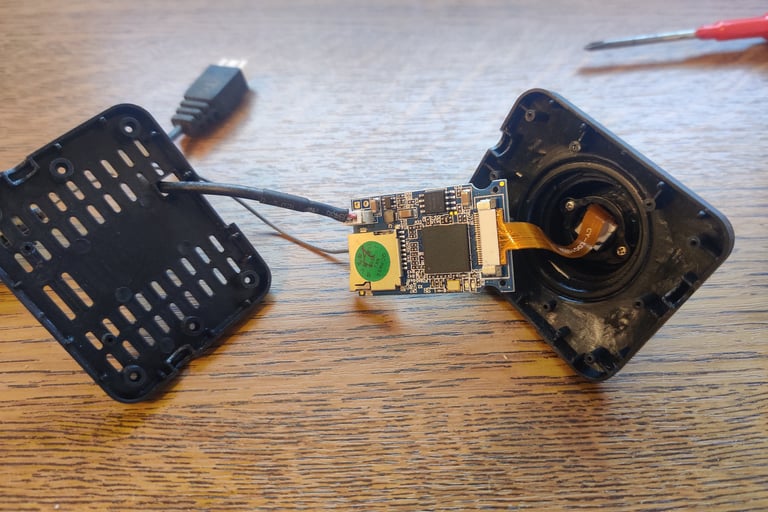
Cette caméra fonctionne sur des fréquences wifi donc au minimum, 2,4GHz. Dans un milieu aquatique il est donc impossible que j'arrive depuis la surface à recevoir un flux vidéo.
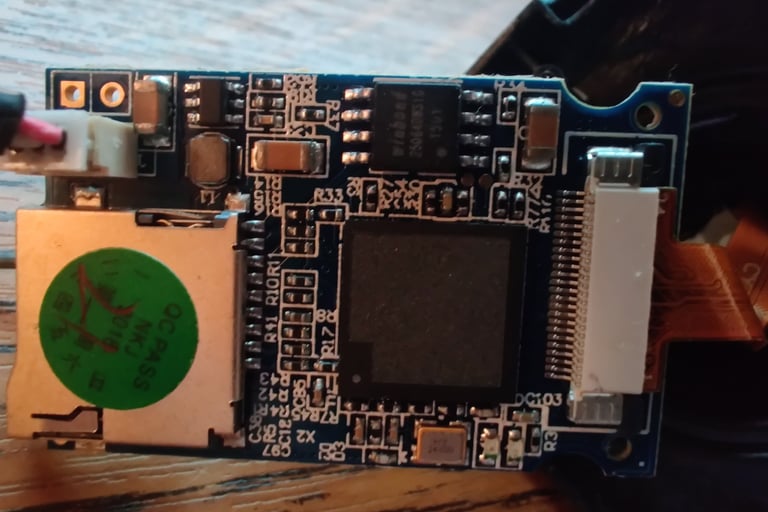
J'ai ouvert la caméra et il n'y a aucune fiche sur laquelle je peut me fixer pour récupérer le flux vidéo.
La caméra fonctionne de la façon suivante, lorsque l'on l'alimente la caméra créer un réseau wifi sur lequel je doit me connecter avec un téléphone. Une fois sur ce réseau wifi je lance l'application MJX FPV, avec laquelle la vidéo s'affiche. Depuis cette application je peut prendre des photos ou enregistrer des vidéos de la caméra. La caméra peut aussi accueillir une carte sd sur laquelle à partir de l'application ont peut enregistrer des vidéos.
Il n'y a bien évidemment aucune datasheet en ligne.
Maintenant la question est : Comment récupérer la vidéo sur notre Raspberry pi ?
Il faut que j'arrive à trouver l'adresse IP de la caméra pour pouvoir me connecter en dehors de l'application de MJX.
Pour cela j'ai essayé à partir de l'application MJX de retrouver une adresse IP en partant du fichier APK. Cependant le fichier APK est compilé et il est impossible pour moi de lire des informations.
Théoriquement cela est possible de récupérer les informations de la caméra, cependant par manque de temps et parce que la caméra n'est pas de bonne qualité, cela n'est pas assez intéressant d'aller plus loin dans la recherche.
La caméra étant minuscule une fois démontée, si il me reste du temps j'essaierai de la faire fonctionner pour en faire une caméra secondaire, qui filmerait depuis le dessous du drone par exemple.

Projet toujours en cours, la dernière mise à jour du site date du : 22/02/2024